3.4: IIR Structure

There are several ways to represent time-invariant linear discrete systems using a network diagram: in fact, given a rational transfer function there are more than one network configurations.
Generally, the choice between the several networks depends on the coefficients quantisation. In fact, it is well known that the error on a coefficient causes a shift of the root (pole or zero) in the complex plane, leading to a possible filter stability problem. This issue is particular important in the hardware implementations, rather than in the software ones: in our case, we use a numerical representation with 32-bit floating point, which allow us to move the problem from the design phase to the test phase [9]. Our main problem, therefore, becomes the speed performance. Hence, our best network choice is the one with the less number of operations.
To implement the IIR filters, we adopted a direct form (see figure 3.12.). The use of this simple form will help us to achieve real time performances and to avoid big memory overheads:
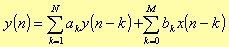
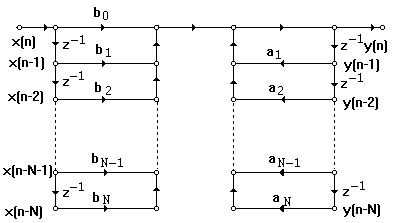
Fig. 3.12. Structure to implement an IIR filter in direct form